IchigoJamで電子工作
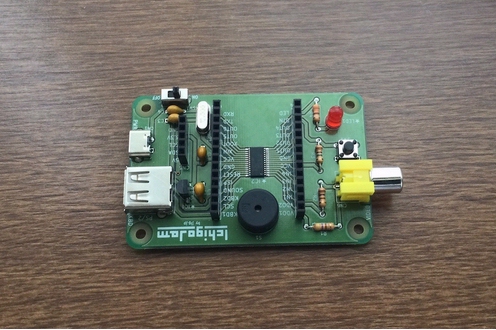
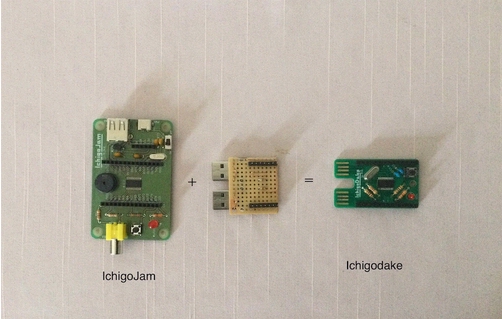
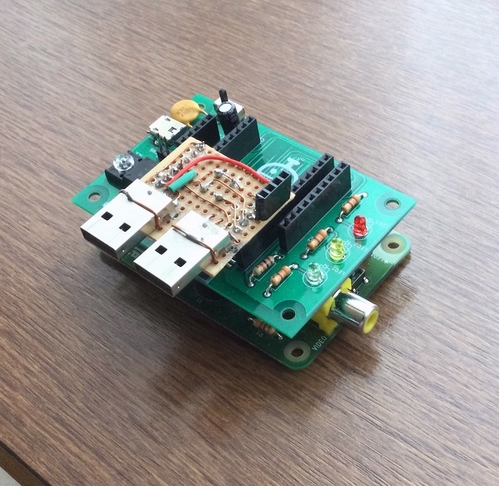
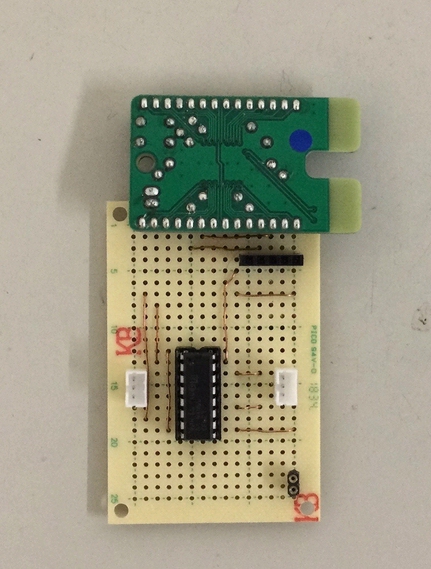
これがIchigoJam基板。Basicインタープリターで開発できるArduinoのようなものである。
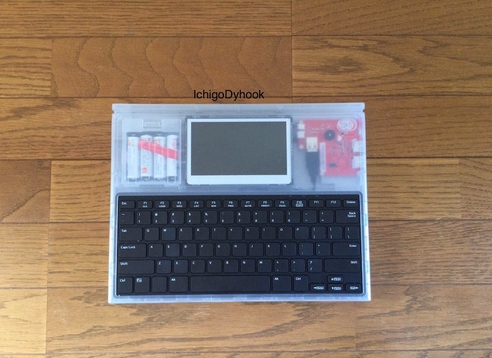
普通はモニターとキーボードを用意して使うが、母艦のようなこどもパソコンが販売されていて、
これでも開発することができる。
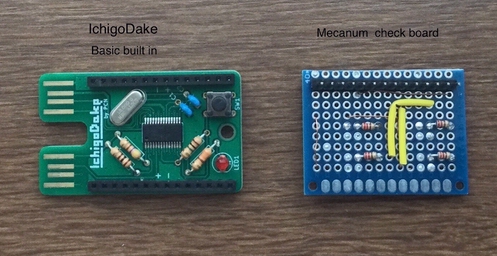
このようなIchigodakeという基板を刺して、プログラムを開発する。

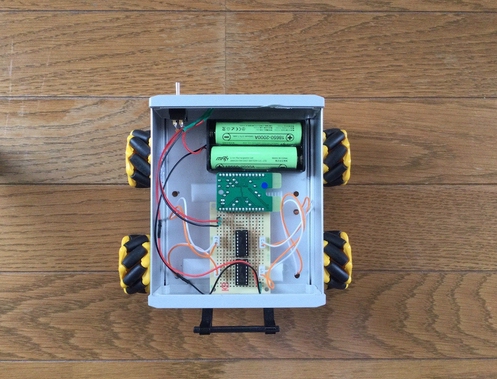
早速Mecanumホイール車のテストプログラムを書いてみた。
動画https://youtu.be/cvZuCw5wggk?si=4Nc5J81MbcAFHtFi
この基板は自動起動させることができるので、この後組み込んでプログラムカーを走らせることができる。
モーター基板を製作した。
設計通り動作することを確認した。
動画https://youtu.be/tMZWy1MntEg?si=tTMwQ-Gbw_mRuGhj
参考 モーターのテスト用基板
プログラムカーなら至極簡単に作れることがわかった。
動画https://youtu.be/XR5Rl_5Fr6c?si=hF1uYrV9axiYOjZS
赤外線、WiFiを使おうとすると大きな壁がある。
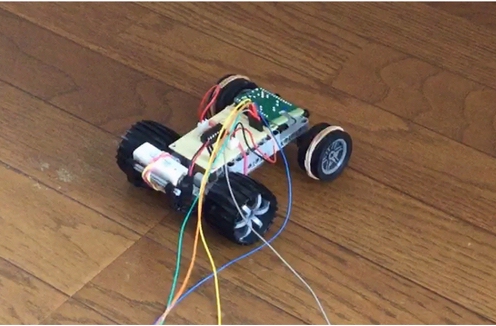
ESP32の時に作った車体に搭載した。
動画https://youtu.be/KOhyT_09bnc?si=UcXo3UigF5s93vBI
前回うまくいかなかったのは車体が軽いこととパワーが弱かったようだ。
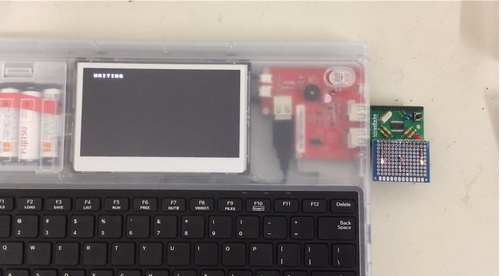
IchigoJam QをIchigoDyhookで使えるようにした。

Basicは無事起動した。

Basicのバージョンは1.4.3となっている。
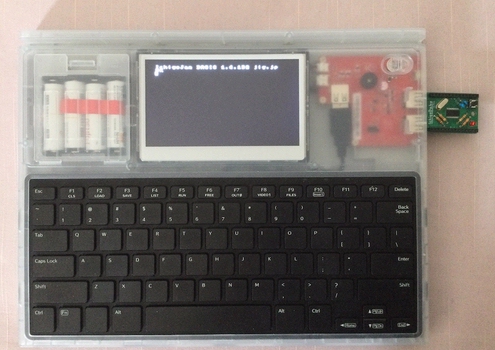
IchigoDakeの方は1.4.1D2となっている。この違いでキーボードのキーが若干異なっているようだ。
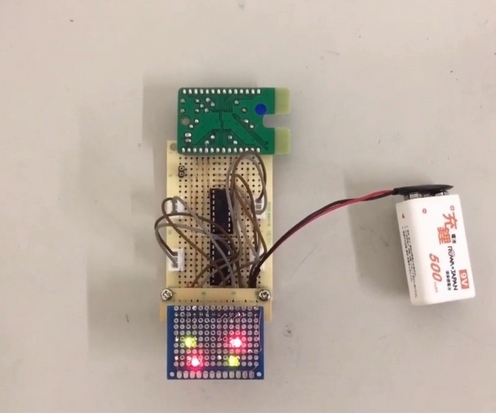
実際にプログラムを開発したところ。
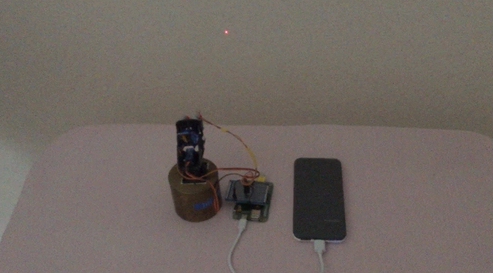
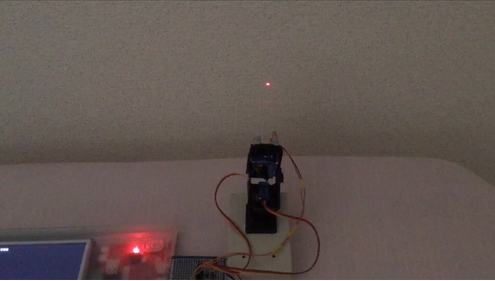
サーボモーターで砲台をコントロールしてレーザーを発射する。
動画https://youtu.be/nXXfNVZSh6Y?si=uJlzfyXCi4q1u1yw
IchigoJam BasicにはCOS、SIN関数があるので正方形と円を描画してみた。
動画https://youtu.be/OTzzXYF-fNY?si=uWLrB1qpihBGDAA7
今度はIchigoDyhook直結なので開発速度は爆速になる。
各コマを合成したもの

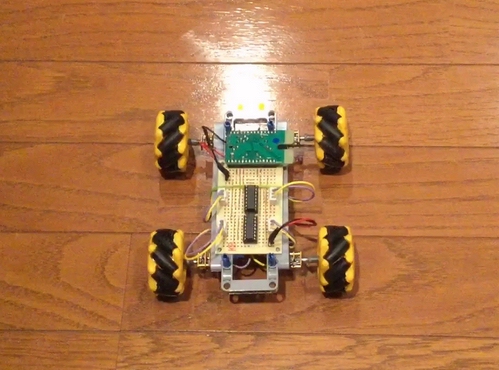
4WS車も手がけてみる。
まずプログラムを書いて、それの検証用の基板を製作する。前進が黄緑、後進が赤、左右はPWM値で明るさが違ってくる。
IchigoDyhookで開発してすぐ検証できる
動画https://youtu.be/0Z7tUVqYqIo?si=tufsFY0gB2KfRIDh
プログラムの間違いをすぐ修正できるのでこのステップを入れた方が良い
走行テストを行った。プログラム通りに動いている。
動画https://youtu.be/_VLoCa8TMdE?si=3veFE_hS9yoRWPKR
Arduino対応のジョイスティックを購入してIchigoJamに繋いでみた。二つの可変抵抗をアナログ的に
読むだけなので動作させる事は割と簡単だった。この製品はバネが強いせいかアナログ的な動作が
させにくい。

動画https://youtu.be/-xd2F37jGU0?si=Ojd5ZGn1Bk7KPk7B
これを使ってリモコンカーを2台作ってみる。
ESP8266を使ったWiFi接続用シールドが用意されているので使ってみた。動画ではネット上のプログラム
を自動でダウンロードしている。ただこれでラジコンカーを作るのは大変厳しいものがある。

動画https://youtu.be/v1TShGpfcrc?si=_xwO0jFCA1fQ5b10
有線リモコンを使った2モーターカー
動画https://youtu.be/5r5LGWhG7Vc?si=X7AHCgWChsYuARTx
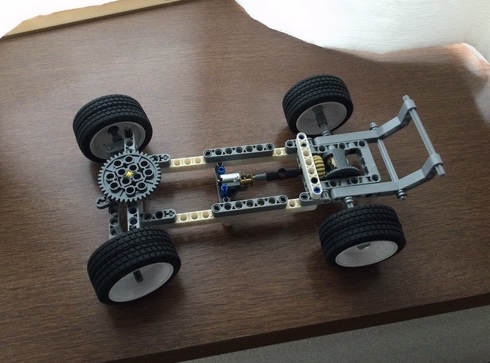
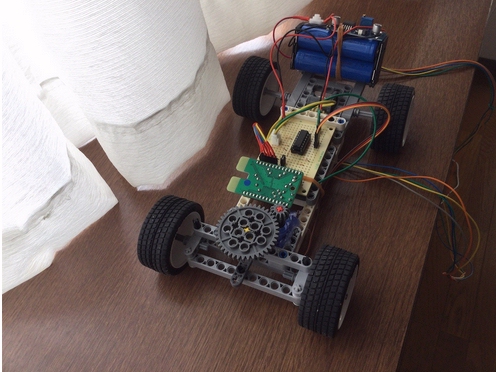
Steering CAR
新しい車体を作って、有線リモコンカーにした。
動画https://youtu.be/rdSDkTx3AXI?si=v3rDxbXYlOsP8qyU
この後無線化に挑戦する。
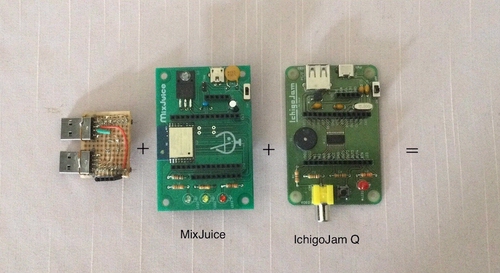
赤外線だとマイコンを追加するみたいだし、ESP-WROOM-02を使ったMixJuiceでは
到底不可能だと思う。
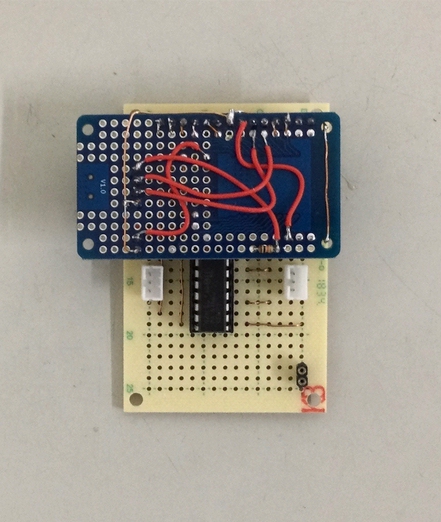
どうせマイコンを追加するのなら、ESP32を追加してIchigoJam
とピンコンパチの ShanghaiDakeを作るという
発想になる。プログラムはシリアル変換モジュールで書き
込むようにする。
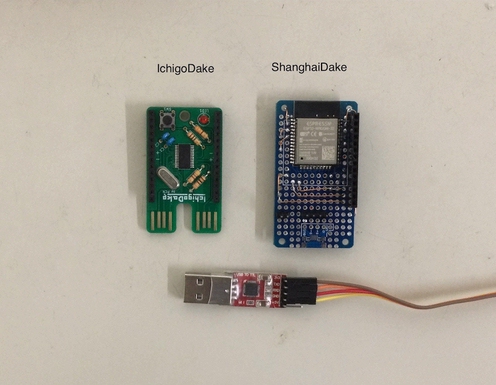
このように挿して使用する。
IchigoDake
ShanghaiDake
車体だけ利用してIchigoJamは消えることになるが、これが素晴らしいパフォーマンスを生む。
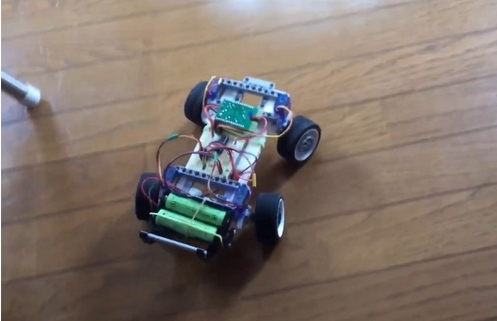
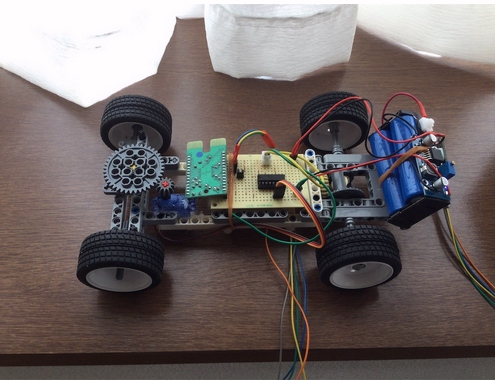
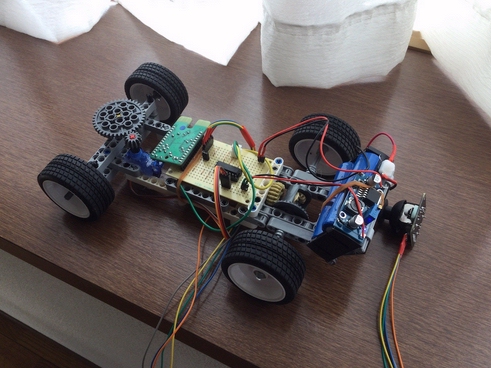
ShanghaiDakeを搭載したところ。これでWiFi
でコントロールできるようになった。
コードはhash include electronics
https://youtu.be/tyY7AN132Xs?si=jPasxmvmZZF9sH0I
のものを改変した。
これにはサーボモーターのコントローラーが二系統あるのでそれを
ステアリングに流用する

動画https://youtu.be/qSTF__XTX9o?si=7gQmyZg65GnF52nr
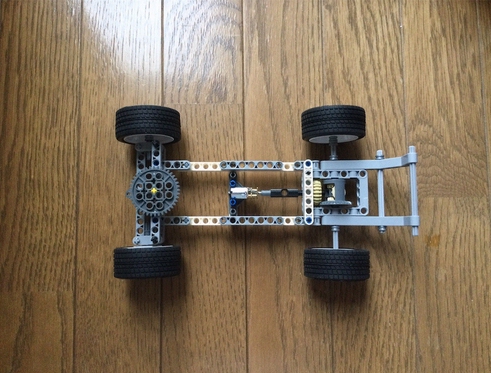
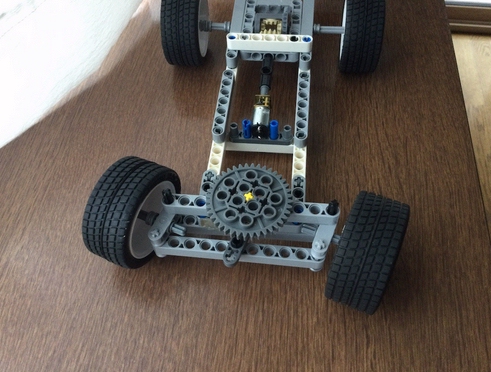
LEGOの新型車体を組んでみた。


これにShanghaiDakeにモータードライバーを組み込んだようなものを載せて使う。

これを見るとLEGOの電動化はLEGOパワーファンクションを使うのが正解ではないことがわかる。