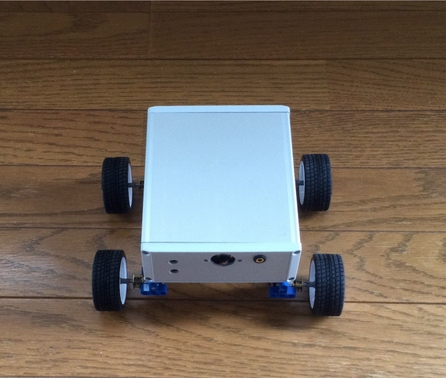
次期探査車RX-1
次期探査車はこんなコンセプトである。RX-1 と命名した。
動画https://youtu.be/rK_DkEEf-IY?si=AJ8K61jlTK3lZcx5
次期探査車RX-1
次期探査車はこんなコンセプトである。RX-1
と命名した。
動画https://youtu.be/rK_DkEEf-IY?si=AJ8K61jlTK3lZcx5
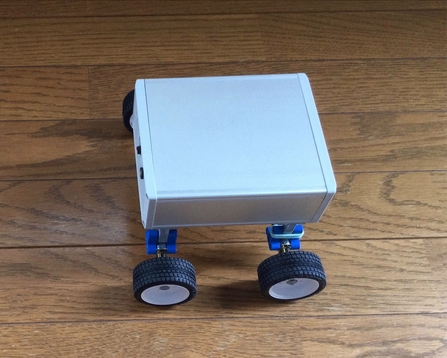
並行して台車ロボットを製作した。むしろこの分野の方が現場で活躍するかもしれない。

動画https://youtu.be/kMWsvDXno_M?si=OIfBvBf3UqTzHVja
動画では前進で少し曲がるがモーターを交換したら直進するようになった。
運搬車として活用する。
動画https://youtu.be/1hsDjOOuT5A?si=s7mZMM0TqshxaMbl
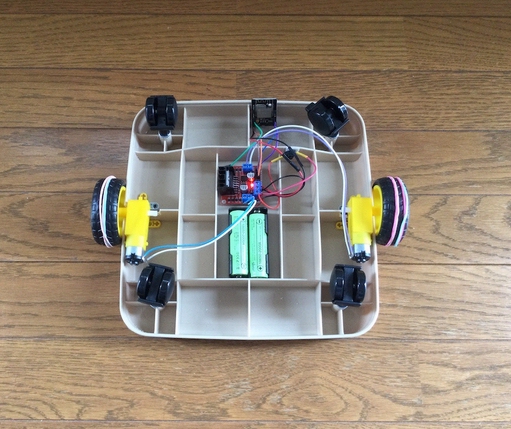
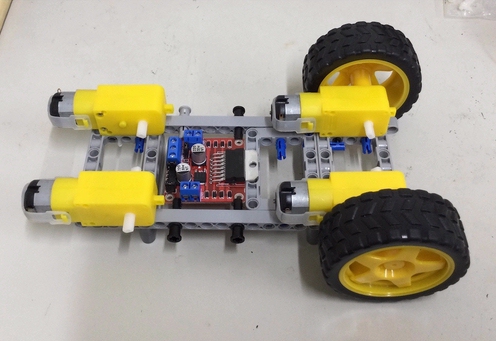
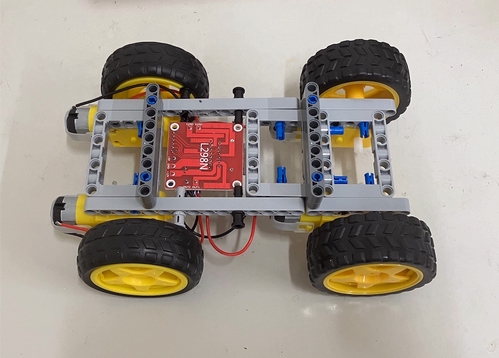
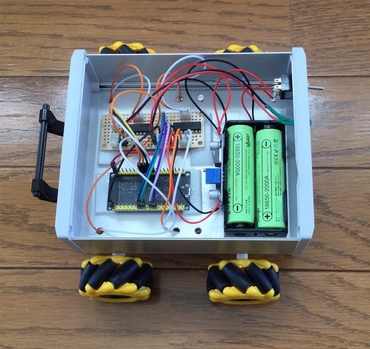
メカナムホイールの車体も製作した。


4輪が別々に動くのでESP32を搭載している。
動画https://youtu.be/STDoBoHWK1Y?si=-nA1oeUo9LLKmasR
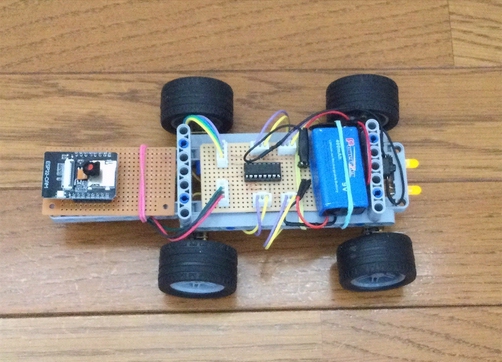
このようなものを作っている。
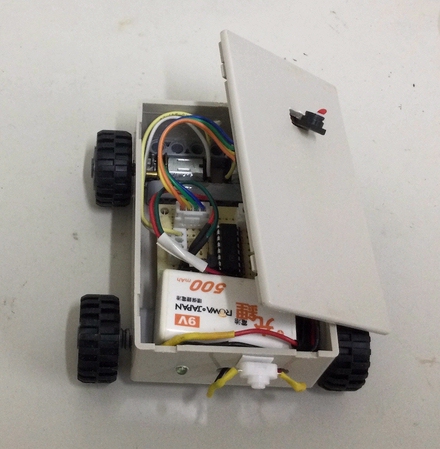

ESP32-CAMの5V入力に8Vを入れても壊れない。レギュレーターで5Vにするとうまくゆかなかった。
動画https://youtu.be/kYYoRCllsic?si=Q5trJ7XyJ6_sWSXk
このような車体を作っている。
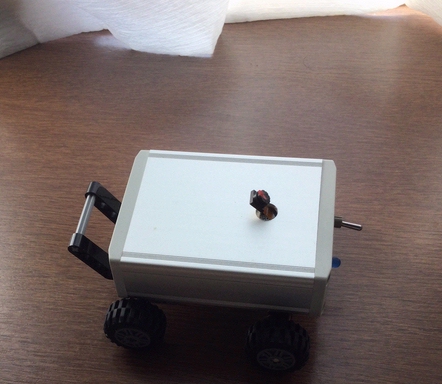


残暑の中テスト走行を行なった。

動画https://youtu.be/waGA7IYFzZU?si=PmoF8fE64XSIu6fw
このような車体を作ってみた。



動画https://youtu.be/6z3efMNn0Bg?si=q4_gLOhWgfAMfbwf
牛車をワゴンに装着した。

動画https://youtu.be/ne7lqGcnj_A?si=cKU2RAp_BeIrYFpW
このような車体を作っている。完成したら動画を紹介しよう。
完成したのでテスト走行を行なった。
動画https://youtu.be/ZJV9IkVuBII?si=P9NWGJlV0fkdXN8Z
スーパー牛車をワゴンに仕込んだところ。わりと上手くいっている。

動画https://youtu.be/AntQcclpMMc?si=5-Ml-JxkQq1oEQ4c
スーパー牛車2
なかなか良いのでもう一台作ることにした。

白いのはベトベトするビニールテープで、黒いのがベトベトしないテープである。ベトベトしないのが
Amazonでも買える事がわかったので交換する予定。
組み立てができたので走行テストをした。ビニールテープも入手できた。3M製で256円する。

動画https://youtu.be/yXJMGyWJrzM?si=LwCE-qBW_rKMPMMt
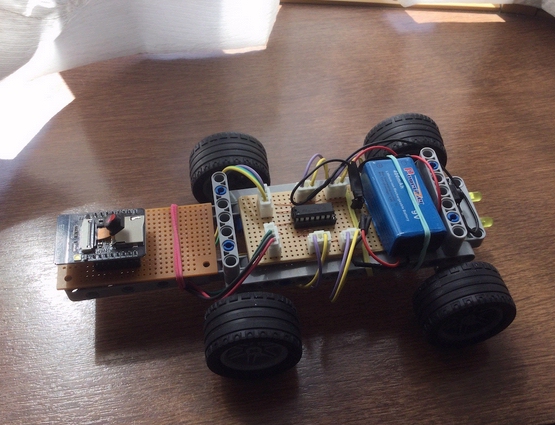
ステアリング方式の車体を少しづつ改良する。

これはモーター直結を試してみたところ。回転が速すぎることがわかった。ギアで変速することが必要だ。
黄色い普及型モーターであれこれやっているがあまりうまくいかない。ギア軸に直結だとモーターが
車体からはみ出てしまうのでピニオンギアを介するのだが、作りに剛性の問題があってまだうまく動作しない。
完成したのでテスト走行を行なった。

動画https://youtu.be/uPOsSRBj13g?si=o3oirg-FM76rAihL
並行してパーサヴィアランスと同じ方式のステアリングを試作する。

実験機が出来上がった。

プログラムを書き換えて、四輪がパーサヴィアランスと同じ動きをするようにした
完成したのでテスト走行を行った。

動画https://youtu.be/frwdveQZSKk?si=sLXKSgnuDfsd2wSe
この機構をパーサヴィアランスに組み込んでみたい。
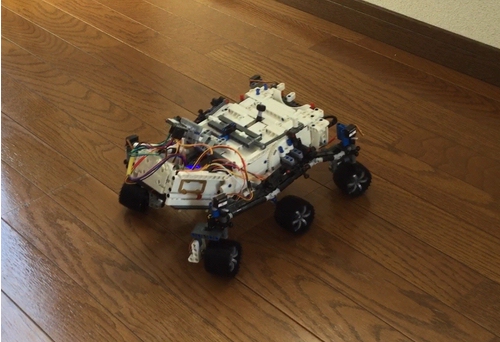
パーサヴィアランス電動化計画
半年以上前から夢想はしていたが、出来そうな状況になってきた。

プログラムが出来上がったのが大きい。小型のサーボモーターも入手できた。

駆動用モーターはいつもの中国製のものである。

サーボモーターで四輪を回転させるところまで組み立てた。

動画https://youtu.be/eUnWhnztGQ0?si=I7MX2gJsbLxS3mCk
ほぼ完成しているが、色々と問題がある。
足回りをよりシンプルにしたモデルを試作した。調整しているとモータードライバーの
片チャンネルが死んでいることが判明したので、新しいのに交換した。うまく動作する
ところまで追い込んだが、電池の重みで足回りの撓みが生じてくる。ここから電池の
軽量化に取り組んでゆく。

改良前

改良後

これで上手くいった。サーボモーターの電源は5Vにこだわるよりもシンプルに大容量の方が良いらしい。
軽量化と共にサーボモーターを全部交換して組み直した。

動画https://youtu.be/rK7PzuZjNdE?si=AtuFzFQIj7I-3R5-
軽量化と共にサーボモーターを全部交換して組み直した。
動画https://youtu.be/rK7PzuZjNdE?si=AtuFzFQIj7I-3R5-
パーサヴィアランスの心臓部を作っている。

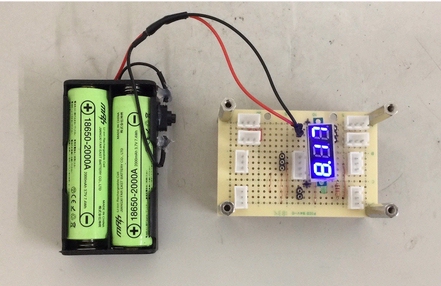

信頼性を高めるためXHコネクターを使用する。またバッテリーの電圧変動を監視出来るようにした。
人類が火星に到達するのを楽しみに生きている。それまでにちゃんとしたMars
Roverを作っておきたい。
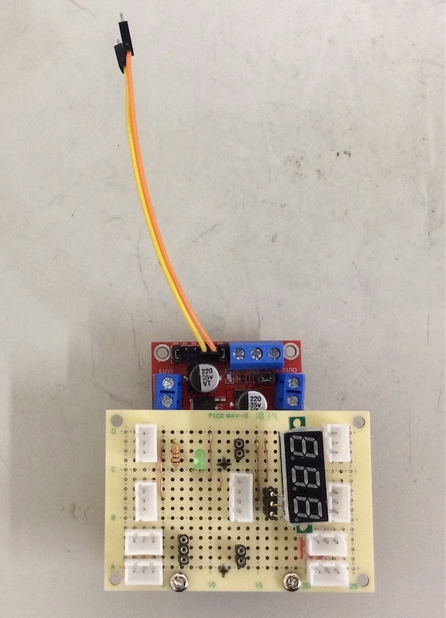
コネクタをPHに変更して基板を組み込んでみた。
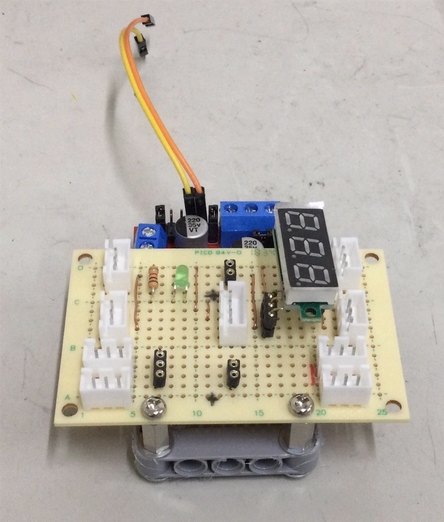
調整と手直しを進めている。今回はスポッと抜ける部分が皆無なので順調に進んでいる。
レギュレーター基板を導入した。可変式だが5Vに設定している。これによってバッテリーが一つ減った。
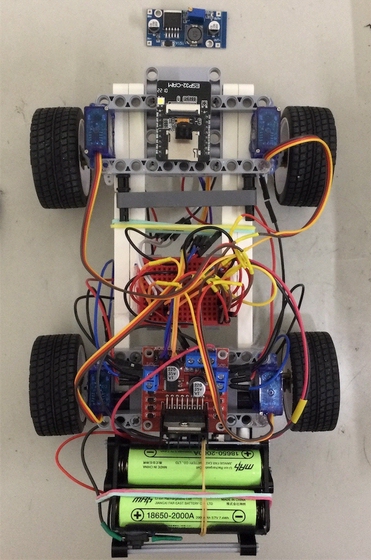
サーボモーターの動きがきびきびとしてきた。無かった時は一つだけ動作が遅れるような現象があった。
LEGOの方もこのやり方でやってみる。
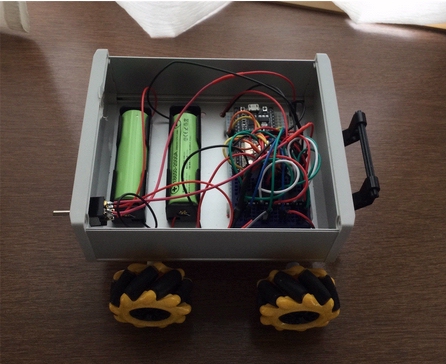
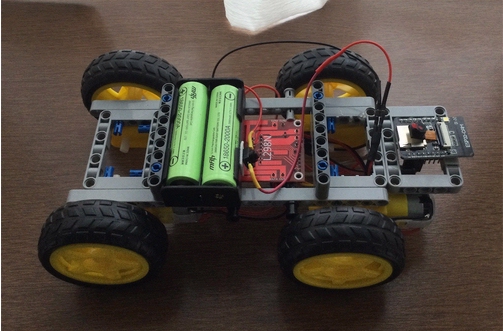
メカナムホイール車を改良した。基板を製作し、電源も改良した。ESP32の無線で動作し、
スマホでコントロールできる。

動画 https://youtu.be/h03qkfFuWik?si=LSeXQZ1NYLRp-gpu
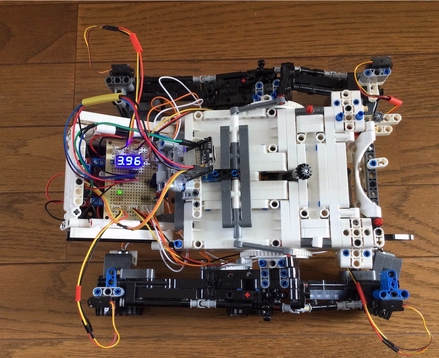
パーサヴィアランス電動化が滞りなく終了した。
動画https://youtu.be/yoivjP4Lj2U?si=zHV4P3bCFhQVoDtW
どこかで挫折するかと思ったがなんとか完了した。幸運だったかも。

































