小型で安価なESP32の導入を進めている。
調べてみると結構ハードルの高さを感じるが、徐々に進めてゆこう。

小型で安価なESP32の導入を進めている。
調べてみると結構ハードルの高さを感じるが、徐々に進めてゆこう。
ESP32にプログラムを転送する事に成功した。

動画https://youtu.be/SLWHL_QAMA0?si=xr7qzbQIY6UnkYun
いろいろやってみるとPWM制御が出来ない事がわかってきた。初心者すぎて突破する方法が分からない。
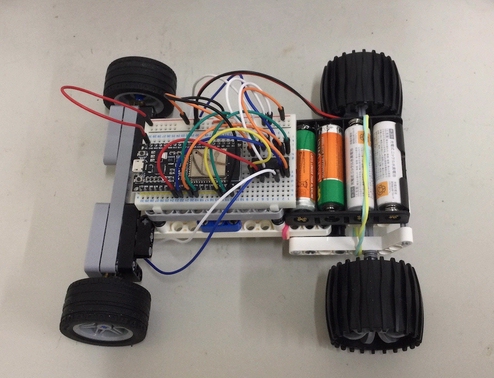
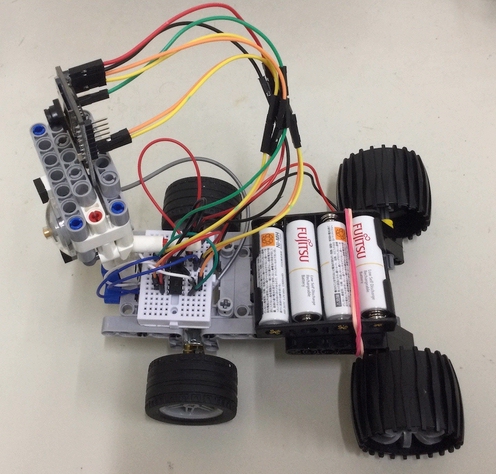
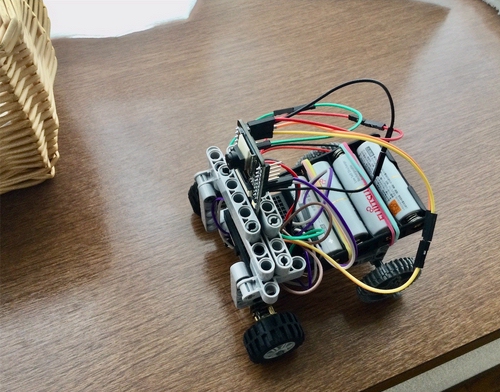
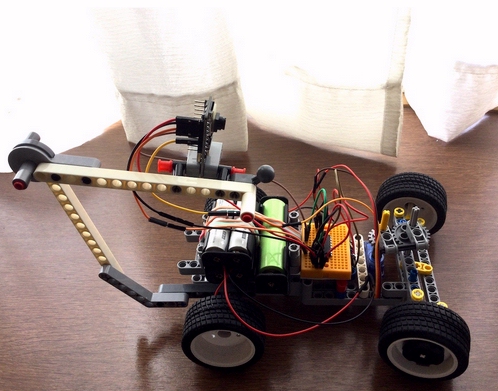
車体が完成した。電源はESP32用に単三型3本、モーター用に006P型一本を使用し、完全別電源となっている。
モータードライバーにはL293Dを使用。
プログラムもうまくできたので試運転した。
動画https://youtu.be/9j3h2XcF9Fg?si=Utzb82YtkuRDmnbc
そういえば今日はH3ロケット3号機打ち上げの日だ。
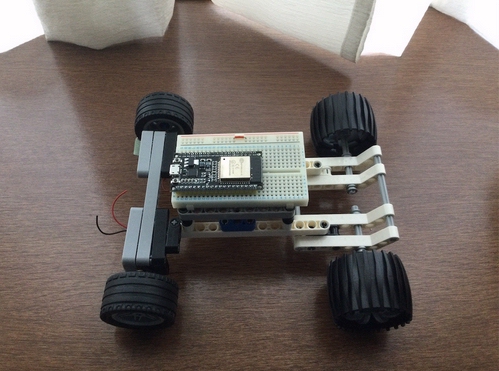
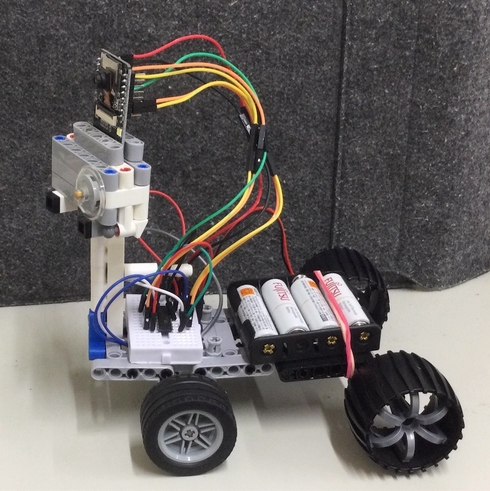
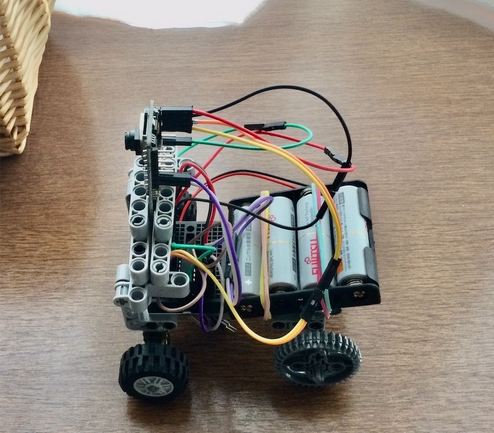
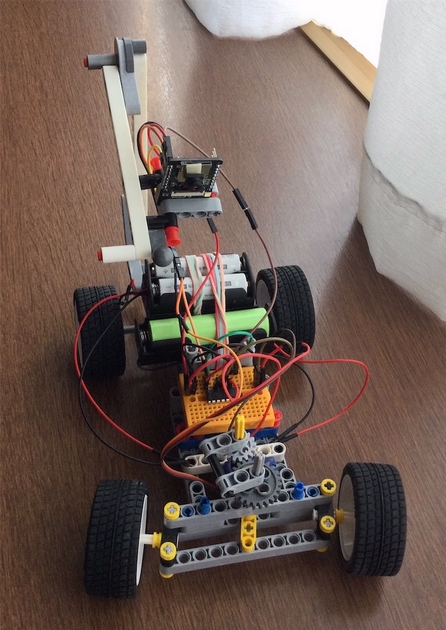
2モーターの車体も小型化しバッテリーを積んだところ。

軽快に動いている。PWM制御は使わずに済んだ。
動画https://youtu.be/XnkEQIxZ8aA?si=EjGLqDHp89IlAI33
Wi-fi、BTも出来るはずだが、目下の課題として取り組んでいる。
2モーター仕様の車体が完成に近づいてきた。

Wi-Fi接続にも一度成功した。その後熱暴走したが。電源部を充実させ安定動作を実現したい。
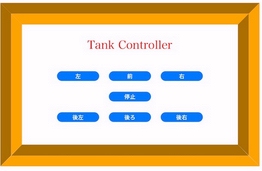
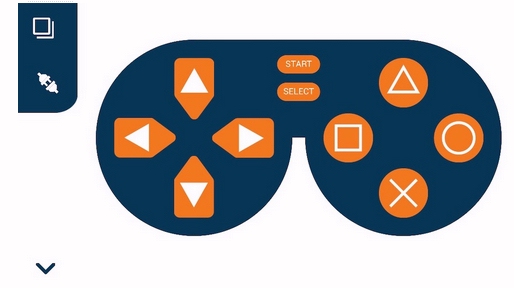
Wi-Fi
に接続しコントローラーが表示できた。プログラムも無事動作した。電源は小型のモバイルバッテリー
一個で賄っている。今のところ動作が不安定になることはない。

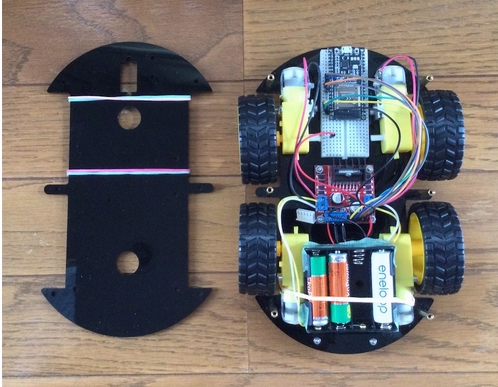
新しい車体が出来上がった。2モーター仕様である。
配線したところ。
今回はこのサイトを参考にした。Bluetooth Car
である。

早速試運転する。
動画https://youtu.be/JsNw6hLn15M?si=60VNV_G4N-UjmWB6
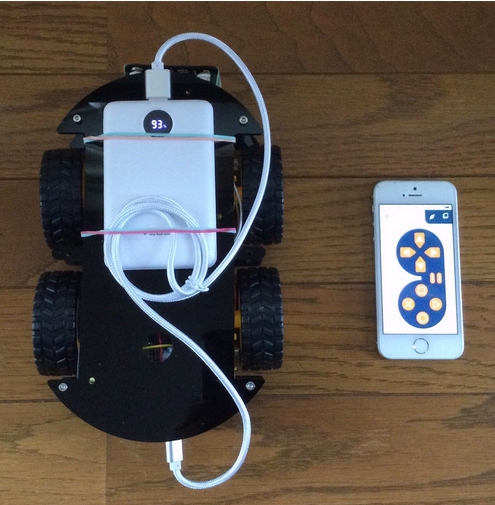
ステアリング方式のBluetooth Car がほぼ完成した。iPhoneでコントロールすることができる。

iPhoneの表示
動かしているところ 動画https://youtu.be/XKfF6Js9Q6Q?si=4h-SvtwyDbDXzA1G
これでESP32搭載車の基礎研究はほぼ出来上がった。
市販品のシャーシを利用してESP32
とモータードライバーで組んでみた。コードと配線は以下のサイトを参考にした。

内部の仕組み。
バッテリーは二組使用した。iPhoneが使えるのはエレガントで便利である。
動画https://youtu.be/Nje7BMByD8c?si=xvDW
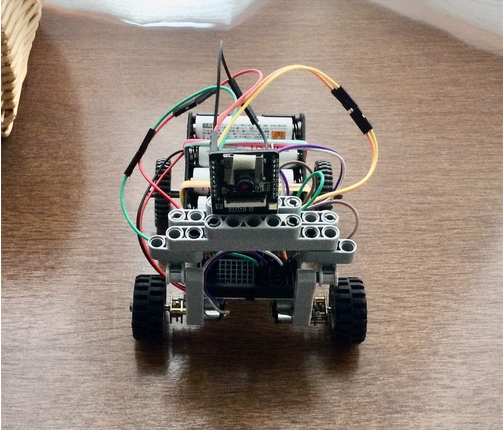
このような車体を作っている。搭載しているのはESP32ーCAMである。これとモータードライバーと電池があれば、
Wi-Fi、BT、カメラ、モーター制御ができてしまうという驚きの仕組みである。
インドの例に倣ってAruidinoからcodeを書き込んだ。Wi-Fi、CAMはうまく動作した。

モーターも回転させることができたが、Wi-Fiが切れてしまうので工夫が必要だ。
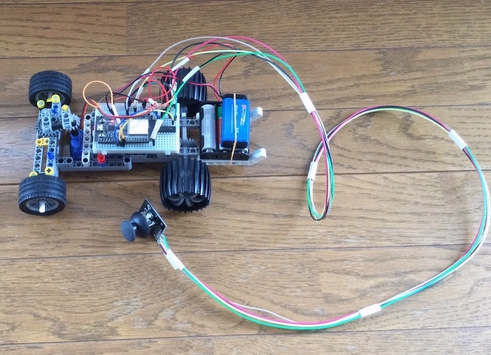
カメラ付き探査車が完成した。
以下のYouTubeチャンネルを参考にして製作した。
試運転を行った。 動画https://youtu.be/QaieQyZUqjs?si=CQdTCeEl33M5nRxh
自前のローバーの車体に自前の電子回路を搭載するところまできた。
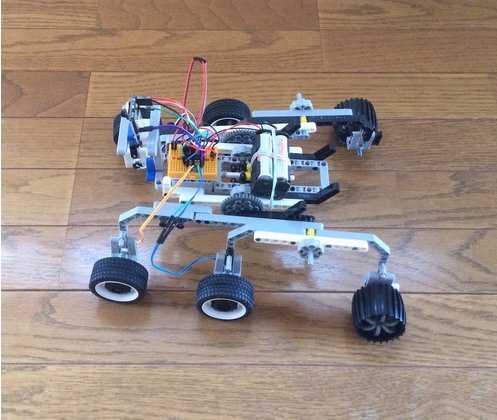
動作は確認済みなので近いうちに走行テストを行う。
テスト走行を行なった。ESP32のPWM制御の関数については既に解決している。ボードのバージョンを
少し古くしただけである。
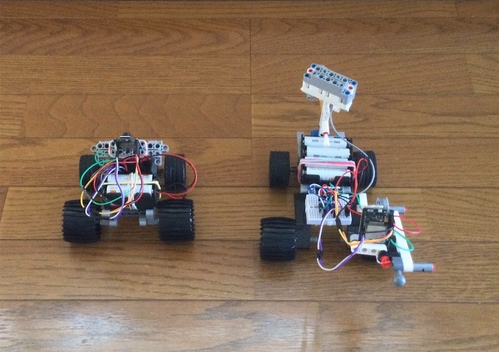
前回の車体
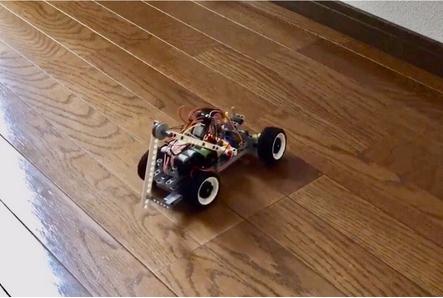
今回の軽量車体

動画https://youtu.be/dzTBZ8NOHGU?si=M7ElioVO2TS880ac
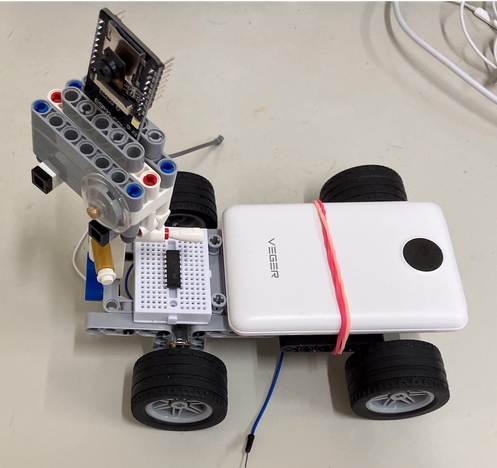
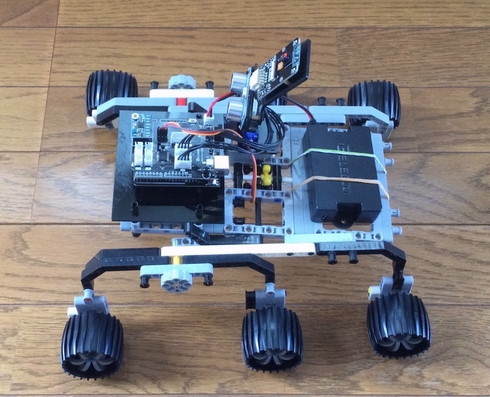
このような車体が出来上がった。サーヴェイランスロボットの秀作と言って良いだろう。
ESP32-CAM、170穴ブレッドボード、L293Dモータードライバーを使用している。モーターは
マイクロミニN20ギアモーターDC3V-6VS低速フルメタルギアボックスレデューサーというものである。

テスト走行を行なった。 動画https://youtu.be/zOwdnl7ZuHE?si=LjMDLJqqJOauHzWd
第一回地球探査
火星は無理なので地球人の住処を探査した。
準備した探査車
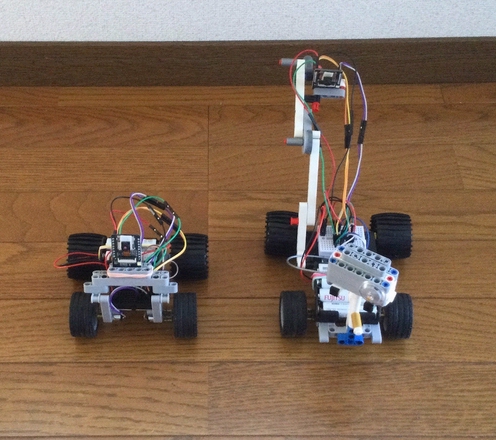
今回は小型の方を使用した。
動画https://youtu.be/Bbcf9URg8EI?si=-aDe6PB3bdGFd3ZG
第二回地球探査
引き続き調査を行った。今回は大きい方を使用した。

動画https://youtu.be/YTC2tcrRpWE?si=GIRwH7zE3YvqXxtW
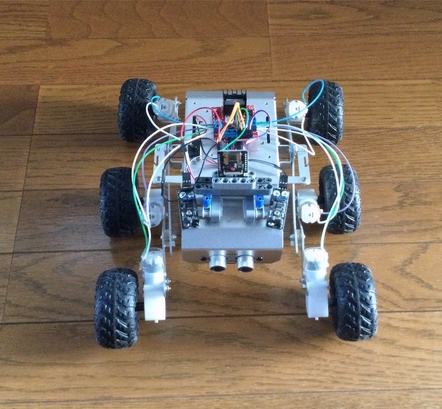
このような車体を作っている。
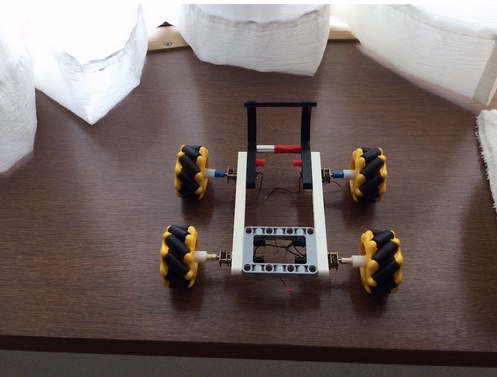

メカナムホイールの車が完成した。ESP32とモータードライバーとバッテリー二組で出来ている。


動画https://youtu.be/ZJNytBFT9Tg?si=5QwltxDdpDftTKIt
Arduino obstacle avoiding robotを試作した。
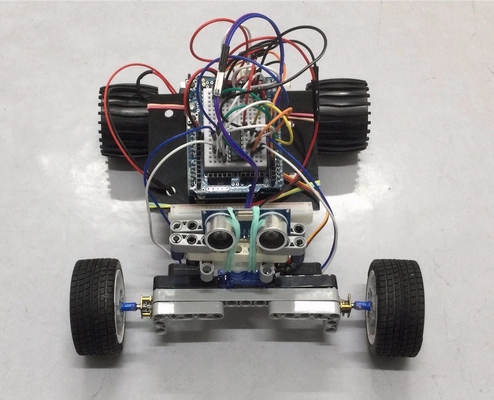
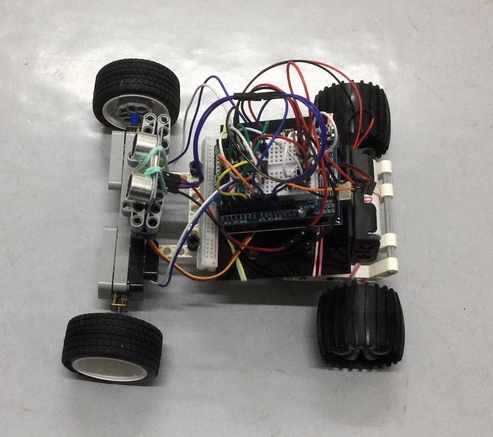
動画https://youtu.be/lBDGtmDsenY?si=KMLalVFskPTHJs4H
ソーラーパネルのみで動く車を試作した。
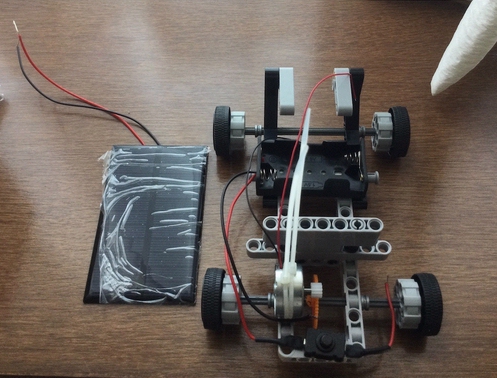
動画 https://youtu.be/P3jh-3amWsI?si=g7hKMtec9Vi__d1P
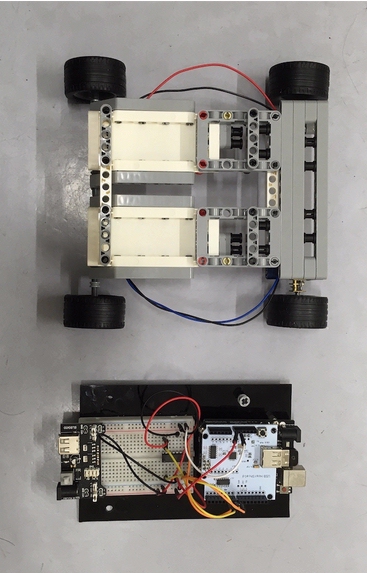
初期のaruidino車も出番が少なくなったので車体を次の探査車に流用しよう。基板は残しておく。
このようなのが出来上がった。凄い事になっているがちゃんと動作する。CodeとDiagramは
hash include electronics を参考にした。インドのIT技術は本物だ。

サーボ用電源は4V電池一個を採用した。共用だとうまくゆかない。

動画https://youtu.be/a1eF8v0MHTk?si=Ks3i1etQ56fgb-dx
ESP32のBluetooth CarだったのをESP32ーcamのWiーfi Carに組み直した。

操縦性が若干改善したように思う。近いうちに動画を紹介しよう。
猛暑の中運転動画を作った。パン用のサーボモーターでステアリングを動かしている。
今回はWi-Fiが不調だった。
動画https://youtu.be/avNwTqb2TPI?si=S3Q-0wOv1z0HtUNx
SunFounder社の車体にESP32ーcamを載せたところ。Wi-FiコントロールCarである。

動画https://youtu.be/liNfZ7txX4c?si=LdUb8u91fTwNC6fy
ここまでできるようになったので次は探査車のニューモデルを製作する。