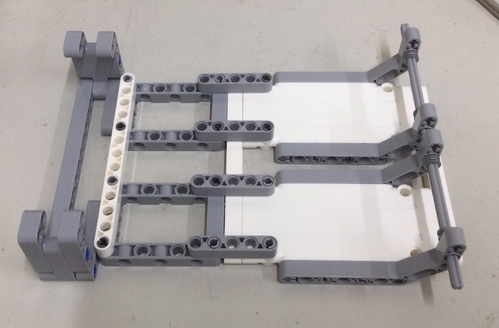
LEGOを組み合わせてラダーフレームの様なのを作ってみた。
月面探査車(Rover)の設計と製作
オリジナルの探査車を設計、製作する。
LEGOを組み合わせてラダーフレームの様なのを作ってみた。
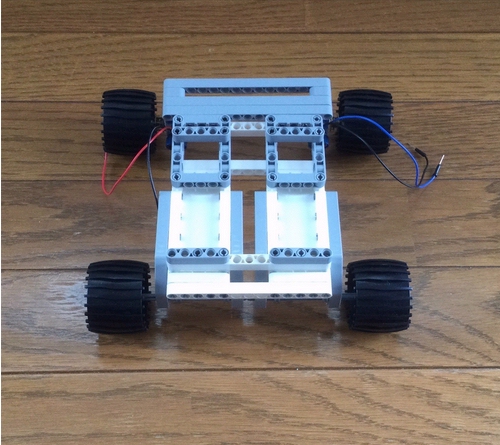
少し車長を短縮して車輪をつけたところ。
フロントビュー

リアビュー
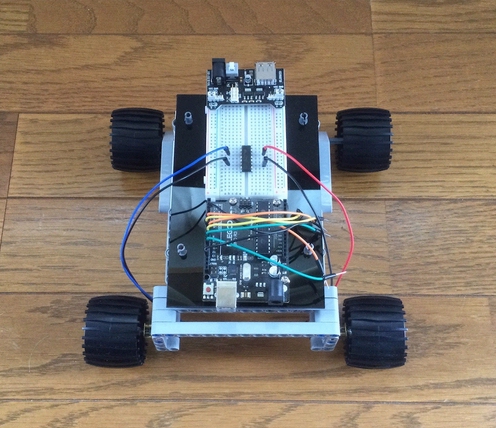
Arduino基板をつけたところ。

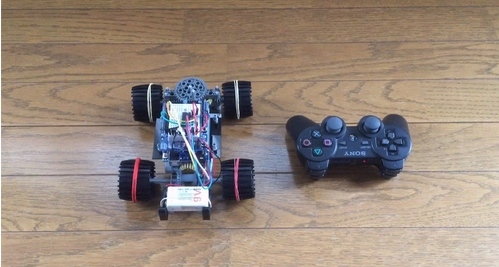
ジョイスティックのリモコンで操縦しているところ。
動画https://youtu.be/4hNm5Rat9gI?si=HmGxRHQDdpPRV1ju
Legoを使ったシンプルな自走車。

動画https://youtu.be/-8AXd1scSX0?si=4KZOnG_LSoXZL3Hd
ソーラーパネルを乗せることができる。
LEGOで組んだ車体に差動ギアと操舵機構を組み込んだ。後輪は1モーターで前輪はサーボモータでコントロールする。

有線リモコンで操縦しているところ
動画https://youtu.be/JZ5YcD7uCwQ?si=6XRajKTDJKWLBhZl
いよいよRoverを無線化する。

このタイプをPS3のコントローラーで操縦できるようにする。コードはGanponさんのブログを参考にする。

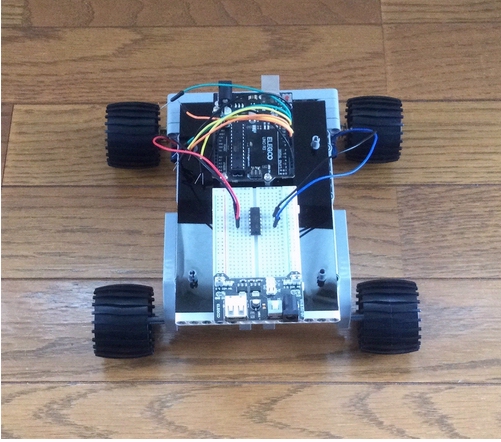
だいぶ形になってきた。

2モーターなのでIC一個でよく、こういった構成となった。Aruidino
UNO R3互換ボードの上にあるのは
USB Host Shieldというもの。USB端子に刺さっているのはBluetoothドングル。ドングル2個目で
PS3コントローラー
と繋がることができた。
プログラムがつぎはぎなのでまだうまく動かない。
ステアリング方式の車体も完成に近づいてきた。電子基板と電池が積めるようになった。
Aruidino UNO R3互換ボード
の上にあるのはプロトタイプエキスパンションモジュール。
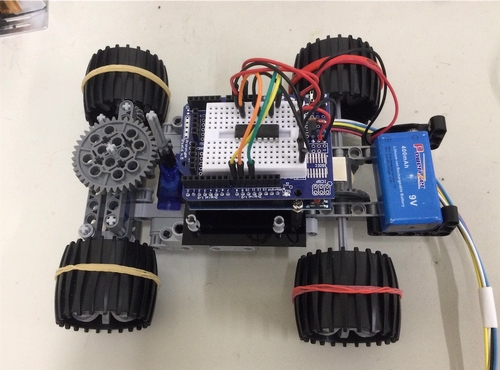
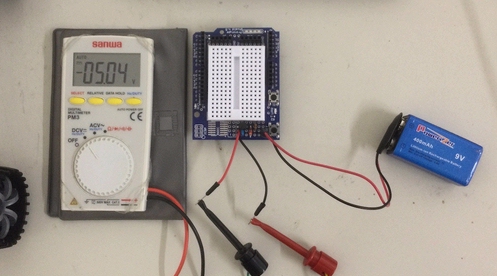
モーター駆動のためのパワーサプライモジュールはかさばらないように自作して付加している。
参考

ステアリング方式の車体を完成させた。プログラムを書き込んで動作させる。

動画https://youtu.be/bK5VcfOfqq0?si=o72UFVimpHX99F0k
ステアリング方式の車体の無線化ができてしまった。
動画https://youtu.be/5srd6nsIUX4?si=15t9JGOEcYl0d9p4
これはミッション完了か。
2モーターのほうもPS3コントローラーと繋がりプログラムも動くようになった。

動画https://youtu.be/l8i_-fub_18?si=9kaV5IUnwB3pFapG
これでミッションは完了した。
























































