いろいろ学んでいかないといけないがまずArduinoでコントロールできる車を組み立ててみた。Arduinoには
マニュアルを読んでパソコンからプログラムを書きこんでいる。

Bluetoothを使ってiPadからコントロールできるところまでうまくいったが、試験中に階段からおちてホイールを損傷した。
今修理中である。
月面探査車(Rover)の組み立て
いろいろ学んでいかないといけないがまずArduinoでコントロールできる車を組み立ててみた。Arduinoには
マニュアルを読んでパソコンからプログラムを書きこんでいる。
Bluetoothを使ってiPadからコントロールできるところまでうまくいったが、試験中に階段からおちてホイールを損傷した。
今修理中である。
ホイールの補修ができたので、試運転を行った。
https://youtu.be/IbYxK6TZQAw?si=lTA7uAoB6nNbcdLm
これから宇宙計画が目白押しなので、楽しみながら自分も学習して大学サークルレベルまで到達してみたい。
昨日の民間ロケット打ち上げは延期になった。またつい最近のことだがJAXAの火星ローバーが共同開発もとの
フランスから届いたようだ。
大きさは民間、大学のものと同じくらいだ。何処かで記事を見つけたが探しても今は見
つからない。
試運転の様子

https://youtu.be/g9xi9jLWOoI?si=SRcyNMWMgk_dLrUy
こちらもプロジェクトを着々と進めている。
これと並行してArduinoのプログラミングも学習する。
https://youtu.be/dYkfMHFeWOA?si=xJvfqwyTVd3-nudB
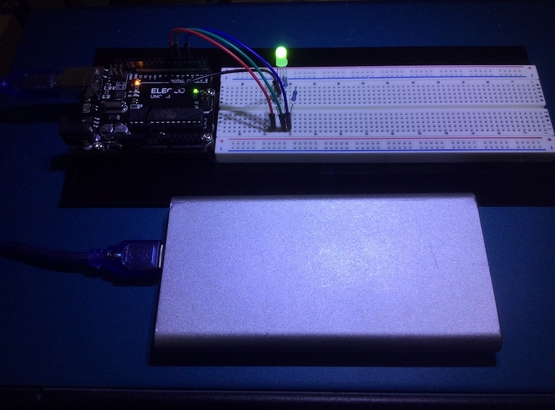
実験しやすいように2mmのアクリル板にArduinoとブレッドボードを固定したものを作っている。
これが届いた荷物

左がNASA
火星探査ローバー パーサヴィアランス、右がGalaxyRVR火星探険車キット。
作るのが楽しみだ。これだけで予算は4万円弱というところか。
Galaxy RVR Mars Rover kit
を組み立てた。電源をオンにしたところ。
左右にある赤外線送受信機は20cm前方の障害物を検知し、超音波センサーは障害物までの距離を実測する
。搭載基板からWi-Fi
の電波を出し、コントローラーとなるスマホでログインする仕組みである。さらに車載カメラで
画像をスマホに映し出す。このままで偵察に使えそうだ。

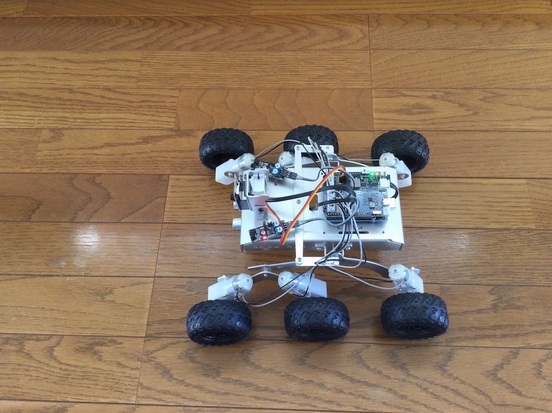
Arduino UNO R3互換基板が搭載されているが、プログラムは書き込み済みなので、すぐ動かせるようになっている。
https://youtu.be/gMHM2GQ-HDM?si=TAcZoDVX
2023年のUniversity Rover Challenge
の結果を紹介する。
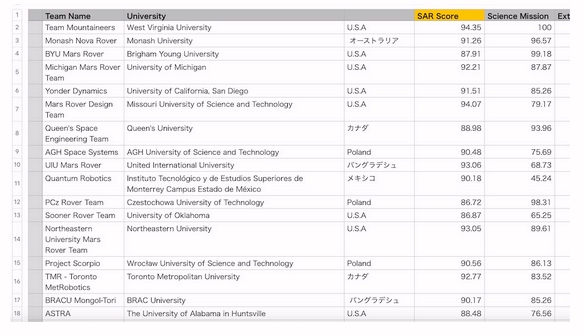
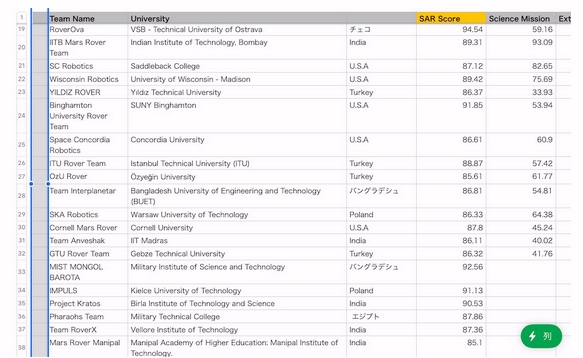
まあこうして見ると工科大学のレベルが高い国がどこかがわかるだろう。今年になってやっと日本から
1チーム出場するというのは何かおかしい。
このような動画があった。
https://youtu.be/EMUFe-QnjE0?si=Jug7wWoV8y2KSIby



JAXAは何故かこれを中途でやめて、おもちゃのローバーを月面に送っている。
このような記事があった。日経クロステックより引用。
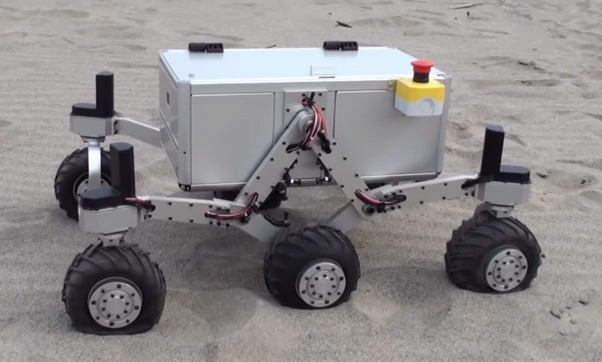
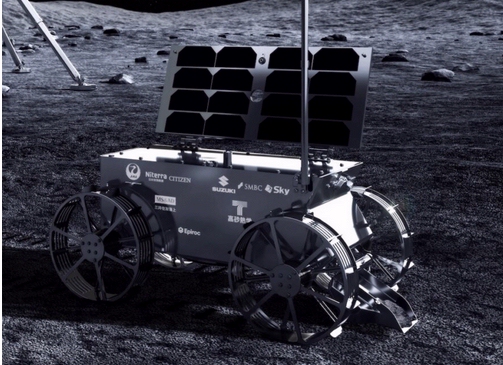
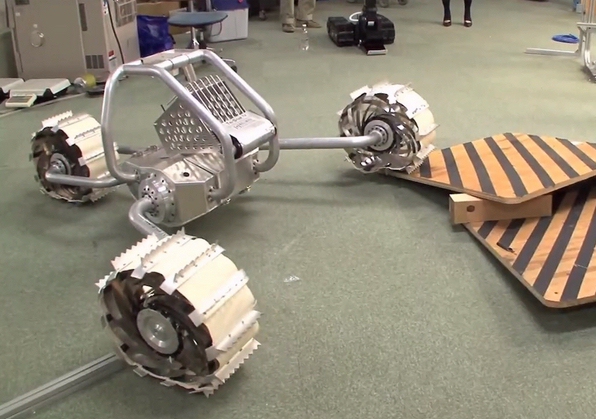
日産自動車は2021年12月2日、JAXA(宇宙航空研究開発機構)と共同研究を進める月面探査車の
試作機を公開した(図1)。砂地で走行する際にタイヤが空転して砂に潜る「スタック」を防ぐ技術の確立
を目指す。日産は得た知見を、自動車の砂地における走破性向上や走行時のエネルギーの効率化に
生かしたい考え。

見たところあまり本気度は高くないようだがこの後どうなったのだろう。日産は撤退したと考えても
良いのだろうか。
このような記事も見つけた。
2022年12月13日(更新日 12月22日) 国立研究開発法人宇宙航空研究開発機構 宇宙探査イノベーションハブ
宇宙探査イノベーションハブと日産自動車株式会社(以下、日産)は、2020年から月面ローバ(探査車)の
駆動力制御技術の確立のために、研究課題「電動駆動制御による砂地走破性の向上」に関する共同研究を
進めてきました。2021年12月には、日産グローバル本社ギャラリーで開催された「NISSAN
FUTURES」に
おいて、共同研究を行っている月面ローバの研究モデルを公開しました(※1)。今回、2022年9月に東京都
三宅島において、この月面ローバ研究モデルを使用した屋外フィールド実験を共同で行いました。
これまで、JAXA宇宙探査実験棟の屋内フィールドで、月面ローバの駆動力制御技術に関する検証実験を
行ってきましたが、今回の実験を通して、提案する駆動力制御技術が屋外の自然環境においても有効であり、
険しい地形で月面ローバが効率良く走行できることを確認しました。
その後の消息はというと
日産が『東京フューチャーツアー』でJAXAと研究を進めている月面探査車の研究モデルを披露
【ジャパンモビリティショー2023】 公開日
2023/10/27
日産は、国立研究開発法人
宇宙航空研究開発機構(JAXA)と研究を進めている月面ローバ(探査車)
の研究モデルを出展。このモデルは月面で想定される砂地でのタイヤの空転量を最小限に抑え、
脱出困難な状態の回避に貢献する日産独自の電動駆動4輪制御技術“e-4ORCE”を搭載している。
今回は、月面に見立てて石を配置した砂の上を走らせるデモンストレーションを実施する。
●デモン
ストレーション日程:10月28日(土)終日、11月5日(日)終日 ※12時~13時を除く
1年経っているが進化は止まっている。
日本の民間企業による月面探査ローバーもあるようだ。

Wikipediaより引用。
HAKUTO(ハクト)は、日本の民間発の月面探査チーム。日本の航空宇宙企業であるispaceにより運営され
、月面無人探査レースGoogle Lunar X Prizeに参加していた。HAKUTOの名称は日本の伝承の白兎に因む。
ispaceのホームページより引用
ミッション2に向けて欧州子会社であるispace
Europeが開発を進めているマイクロローバーは、高さ26
cm、
幅31.5 cm、全長54 cm、重さ約5 kg [iii]です。ランダーの上部にあるペイロードベイに格納され、月面着陸後に
展開機構を用いて月面への着地と走行のための展開を行う計画です。軽量かつロケットの打ち上げ等の振動に
耐える頑丈性を実現するために、躯体にはCFRP(炭素繊維複合材料)が採用されています。
ローバー前方には
HDカメラが搭載されており、月面上での撮影が可能です。月の特殊なレゴリス環境の上でも安定した走行が
できるように、車輪の形状が工夫されています。コマンドやデータの送受信はランダーを経由して管制室と行われます。
更にローバーの前方にはHAKUTO-Rのコーポレートパートナー企業であるEpiroc
AB社が開発するスコップを搭載。
スコップを使用して月のレゴリスを採取し、ローバーに搭載したカメラで採取物の撮影を行う計画です。
2011年の東工大のローバー
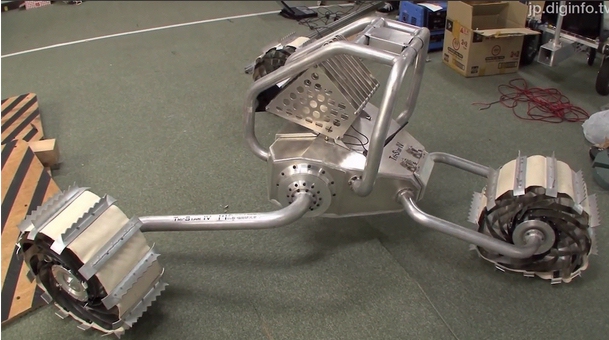
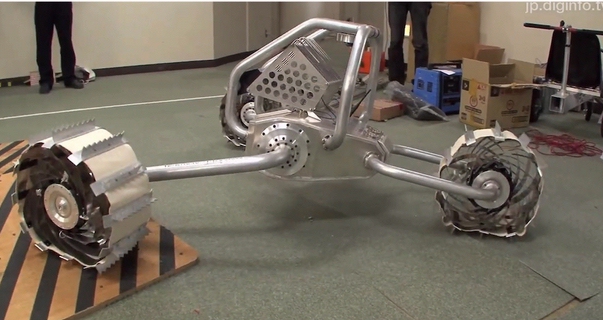
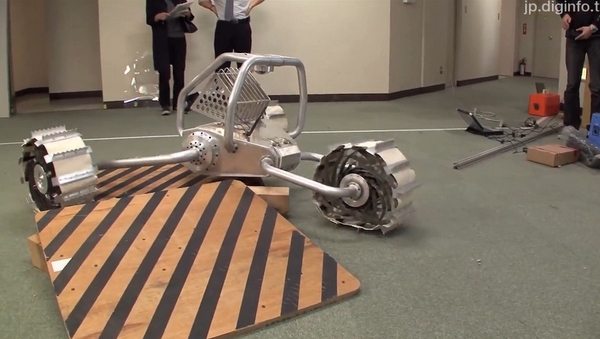

ある意味本命だが今どうなっているのだろう。
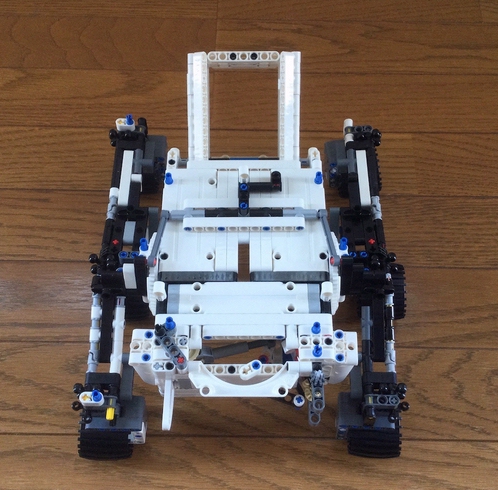
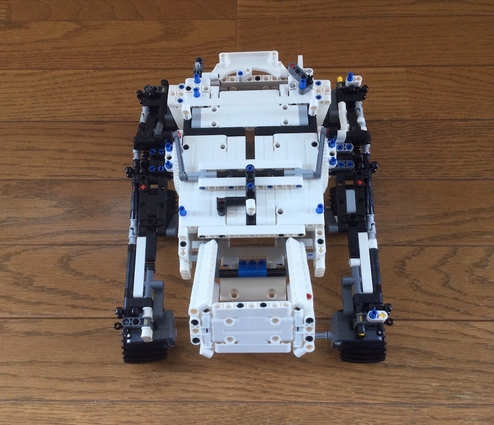
パーサヴィアランスのLEGOを組み立てることにした。

組み立て自体に難しいところはないと思うが部品の色がマニュアルと一致していないのが気になる。


この辺まできた。ブレードが一つ反対向きだ。
1のパーツを作るとここまで来る。

2のパーツを作るとここまで来る。

3のパーツを組み立てるとここまで来る。


4のパーツを組み立てる前に車輪と天板が外せる様にする。
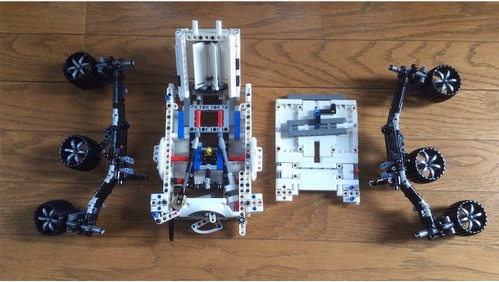
内部のメンテナンスが出来るような体制を作っておく。
ここまで組み立てた。超グッドデザインで惚れ惚れする。
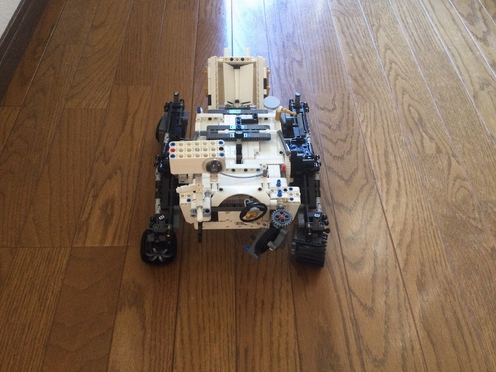
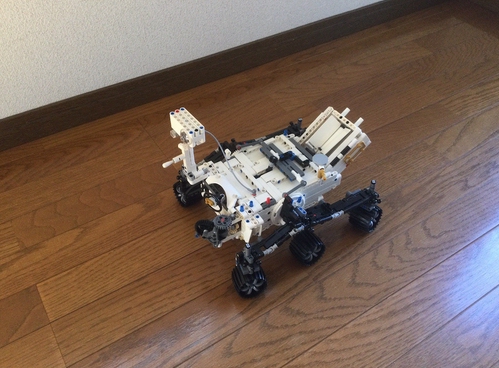
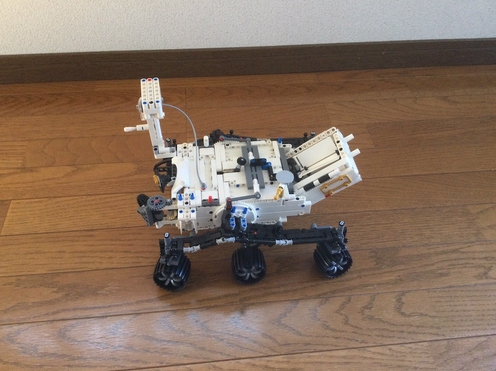

全部組むと天板が開けにくくなるのでこのくらいがちょうど良い。回転メカ、差動メカもフルに動作する。
次の段階はもう一台購入してモーターと電子回路の組み込みに挑む。色々考えているができる自信はない。
LEGOをもうひと組み購入した。
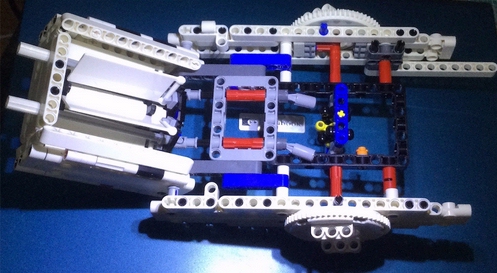
リアテールに電子回路を組み込む。
余った部品で車輪の舵を固定した。

モーターを付けるために車軸を延長した。後はアクリル板を加工すれば組み込めるのはないだろうか。
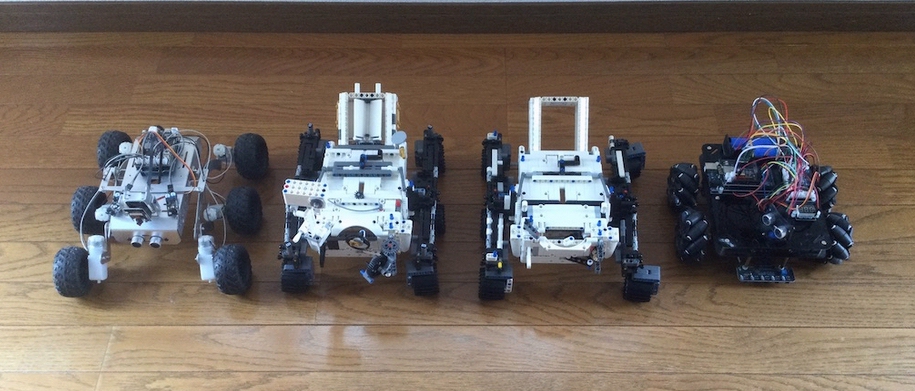
これまでの月面ローバー勢揃い
昨日海南島の宇宙基地から嫦娥6号が打ち上げられたと、日テレニュースが報じている。2024年5月3日のことである。
月の裏側の探査では中国は世界のトップに立とうとしている。このニュースでは2035年までに作られる計画の月面基地
にも言及している。あと11年だな、と心の中で計算した。
テールエンドにアクリル板が入っている。電池ボックスか電子基板が入る予定。

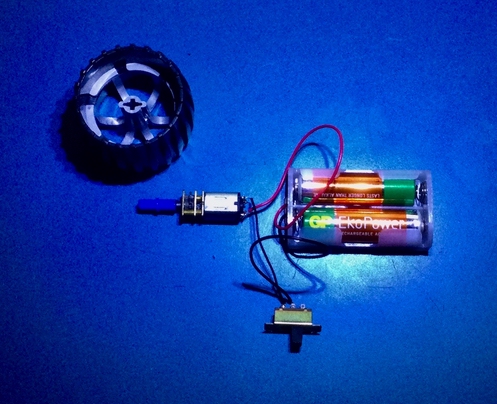
小型のモーターが入手できたので、アルミ版を加工して取り付けられないか考えているところ。
隣のラジオはウィークエンドサンシャインを自動録音しているところ。
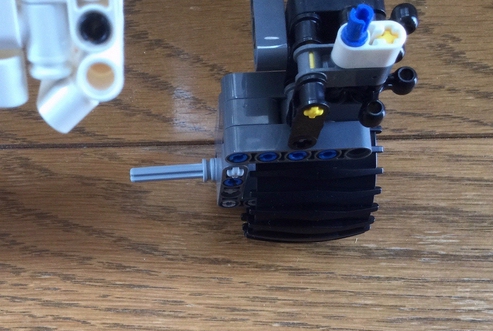
LEGOを使ったモーターアセンブルを試みた。
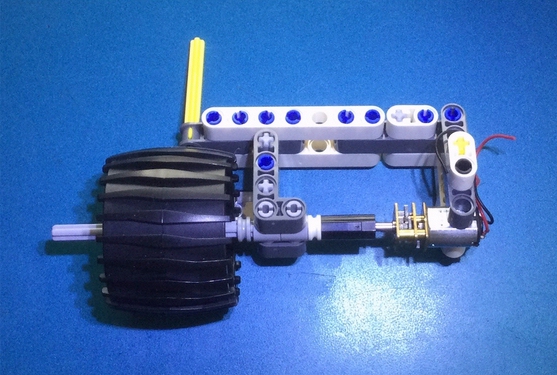

どうも大きくなり過ぎな感じがする。車輪の可動域が制限されている。
少し改良した。
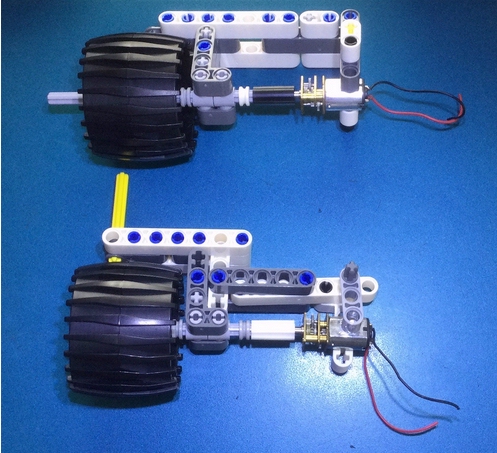
コンパクトにするためにモーター軸を車軸にする方法をとることにした。車台に軸受が無いことになるので
傷みが早いかもしれない。
動画 https://youtu.be/8dgNOimcuWI?si=hezcIm14bD6TpbAg
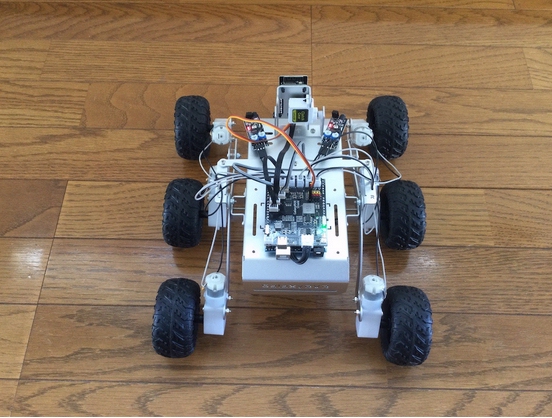
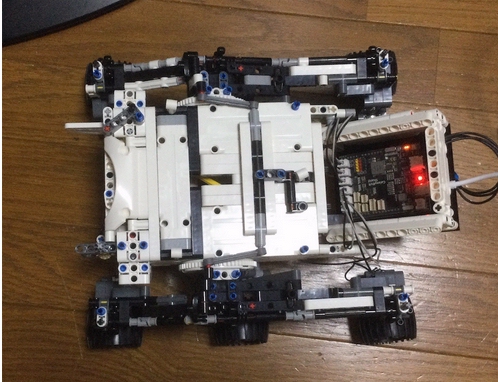
電子回路を搭載した。6個のモーターがコントロールされ、Wi-Fiの無線で操縦できる。
充電しているところ。

動画https://youtu.be/m1YRMfFOC4k?si=kG31b9XMqfGs9jqm
とりあえず目標とするところには到達した。ミッション完了と言ってよいだろう。